


Bonjour,
je voudrais intégrer une équation deux fois sur Matlab ; je sais qu'il existe une fonction "ODE 45" mais je ne sais pas comment l'utiliser.
Inscrivez-vous gratuitement
pour pouvoir participer, suivre les réponses en temps réel, voter pour les messages, poser vos propres questions et recevoir la newsletter






Bonjour,
je voudrais intégrer une équation deux fois sur Matlab ; je sais qu'il existe une fonction "ODE 45" mais je ne sais pas comment l'utiliser.

Bonjour,
Tu trouveras sa documentation en tapant doc ode45 dans MATLAB.
N'hésite pas non plus à effectuer une recherche sur le forum : l'utilisation de cette fonction a été abordée de nombreuses fois.
j'essaye d'utiliser la syntaxe donnée sur matlab
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
et voici l'erreur que sa me donne
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12??? Error using ==> sysmodel Too many input arguments. Error in ==> odearguments at 110 f0 = feval(ode,t0,y0,args{:}); % ODE15I sets args{1} to yp0. Error in ==> ode45 at 173 [neq, tspan, ntspan, next, t0, tfinal, tdir, y0, f0, odeArgs, odeFcn, ... Error in ==> ode at 51 [TT,V]=ode45(@sysmodel,[T:0.02:ll],V0);
la fonction qui contient le modèle à intégrer est:
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
La fonction dont le handle est passé à ode45 : sysmodel dans ton cas doit posséder deux arguments en entrée, et un en sortie. Soit de la forme (pour reprendre les noms de la doc) :
dy est le vecteur colonne de sortie, exprimé en fonction des entrées t et y selon le système
Code : Sélectionner tout - Visualiser dans une fenêtre à part function dy = sysmodel(t,y)y1' = f(t, y1, y2, ...)
y2' = f(t, y1, y2, ...)
...
c'est toujours la même erreur si j'utilise votre syntaxe sachant que la fonction n'admet pas d'argument et que x et y sont des vecteurs quelconques.
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
Des entrées qu'il faudra utiliser d'ailleursEnvoyé par Winjerome

À la place de x et y j'imagine...
N'hésite pas à exécuter les exemples de la documentation au pas à pas pour bien comprendre le fonctionnement.
merci pour vos réponses.
je voudrais savoir si ODE45 peut me donner à la fois la solution en vitesse et en position ?
voici donc mon programme complet:
ainsi que es fonctions à utiliser dans ODE45 :
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
la variable de temps napparaît pas dans mon équation,comment substituer cette variable ?
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14??? Error using ==> minus Matrix dimensions must agree. Error in ==> sysmodelx at 4 xpp=(g/z)*(x-pxm); Error in ==> odearguments at 110 f0 = feval(ode,t0,y0,args{:}); % ODE15I sets args{1} to yp0. Error in ==> ode45 at 173 [neq, tspan, ntspan, next, t0, tfinal, tdir, y0, f0, odeArgs, odeFcn, ... Error in ==> ode at 44 [TT,Vx]=ode45(@sysmodelx,[T:0.02:t],V0x);
mon système est de la forme : xpp=a*(x-xc) et ypp=a*(y-yc)
avec xpp et ypp les dérivées secondes de x et y respectivement.
éclairez-moi je vous pris.
Ton équation étant d'ordre 2, il faut faire intervenir la dérivée d'ordre 1 pour se retrouver avec deux équations d'ordre 1. Le temps n'intervenant pas dans ton équation, l'entrée t ne retrouvera non-utilisée ici.
Tu peux t'inspirer de cette discussion.
[EDIT]Voir ce message
Dernière modification par Invité ; 08/04/2014 à 19h59. Motif: rectification
sa ne marche toujours pas et franchement je n'y comprends rien.
bon, j'ai mis le système sous forme dÉquation détat mais c'est la même erreur:
mon programme principal est:
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
et pour les fonctions:
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
- Pour utiliser des variables globales, il faut les déclarer globales partout où elles sont utilisées, y compris dans ton programme principal.
- même cela fait, tu ne fixes la valeur de pxm qu'une fois les lignes ode passées, cette variable reste donc vide, ce qui pose évidemment problème.
N'hésite pas à déboguer ton programme, mettre des breakpoints là où il y a des problèmes pour regarder leur différentes valeurs afin de comprendre le pourquoi du comment.
maintenant je n'ai plus d'erreur au niveau de ode45 merci .
par contre en dessinant mes trajectoires à savoir x en fonction de y je devais obtenir des sinusoïdes mais moi j'obtiens des droites je me demande si se n'est pas une erreur de logique sur ode45 ?
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
J'ai un doute sur les lignes qui précèdent :
n'est serait-ce pas X0 et Y0 ?
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
Pense aussi à rajouter les abscisses :
Sinon la logique me semble bonne.
Code : Sélectionner tout - Visualiser dans une fenêtre à part plot(TT, x(:,1), SS, y(:,1));
je ne sais pas pourquoi j'ai toujours des trajectoires bizarres et non polynomiale enfin curviligne ?
je bugg
voici le trajectoire que j'obtiens !!!!!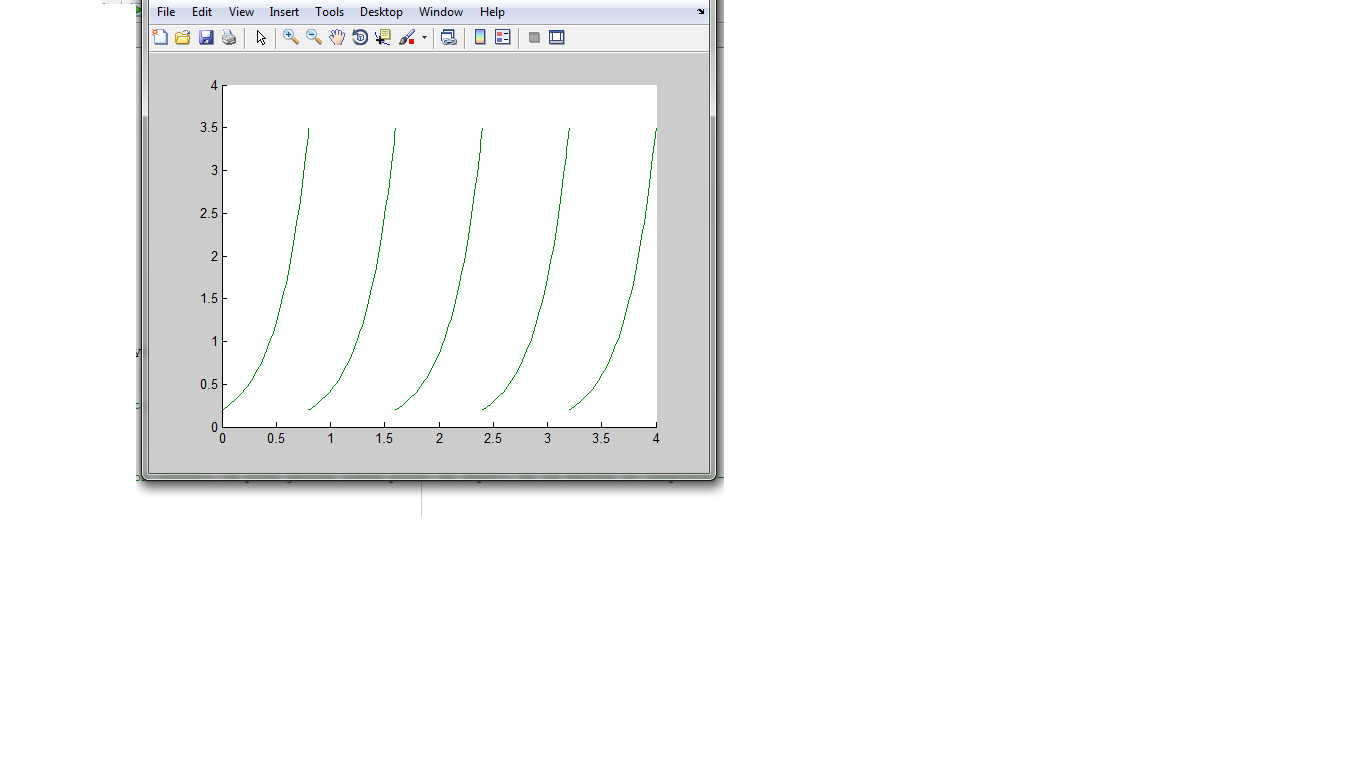
C'est à dire continues ? Si oui, ce sont les conditions initiales X0, Y0 que tu dois revoir.
merci winjerome.
je voudrais poser une question concernant les conditions initiales:
pourquoi influent-elle sur la trajectoire et comment les choisir (critère).
Les conditions initiales correspondent à la position et la vitesse que tu donnes à ton objet au départ.
Imagine une balle que tu lances vers le haut ou vers le bas, elle n'aura pas du tout la même trajectoire dans un cas comme dans l'autre
Dans ton cas, tu sembles effectuer un découpage selon plusieurs intervalles de temps qui se suivent. Si tu redonnes exactement les mêmes positions et vitesses à chaque fois, ne sois pas étonné que ton objet reprenne exactement la même trajectoire.
Au contraire si tu donnes les dernières valeurs prises pour le "prochain lancé", là ton objet continuera sur sa lancée.
je viens de déterminer mes conditions initiales me permettant d'avoir l'allure voulue mais je l'ai fait par tâtonnement, y a-t-il une méthode pour les déterminer avant de dessiner.
merci encore pour ton aide winjerome.
Code : Sélectionner tout - Visualiser dans une fenêtre à part
2
3
4
5
6
7
8
9
10

Vous avez un bloqueur de publicités installé.
Le Club Developpez.com n'affiche que des publicités IT, discrètes et non intrusives.
Afin que nous puissions continuer à vous fournir gratuitement du contenu de qualité, merci de nous soutenir en désactivant votre bloqueur de publicités sur Developpez.com.
 Répondre avec citation
Répondre avec citation
Partager