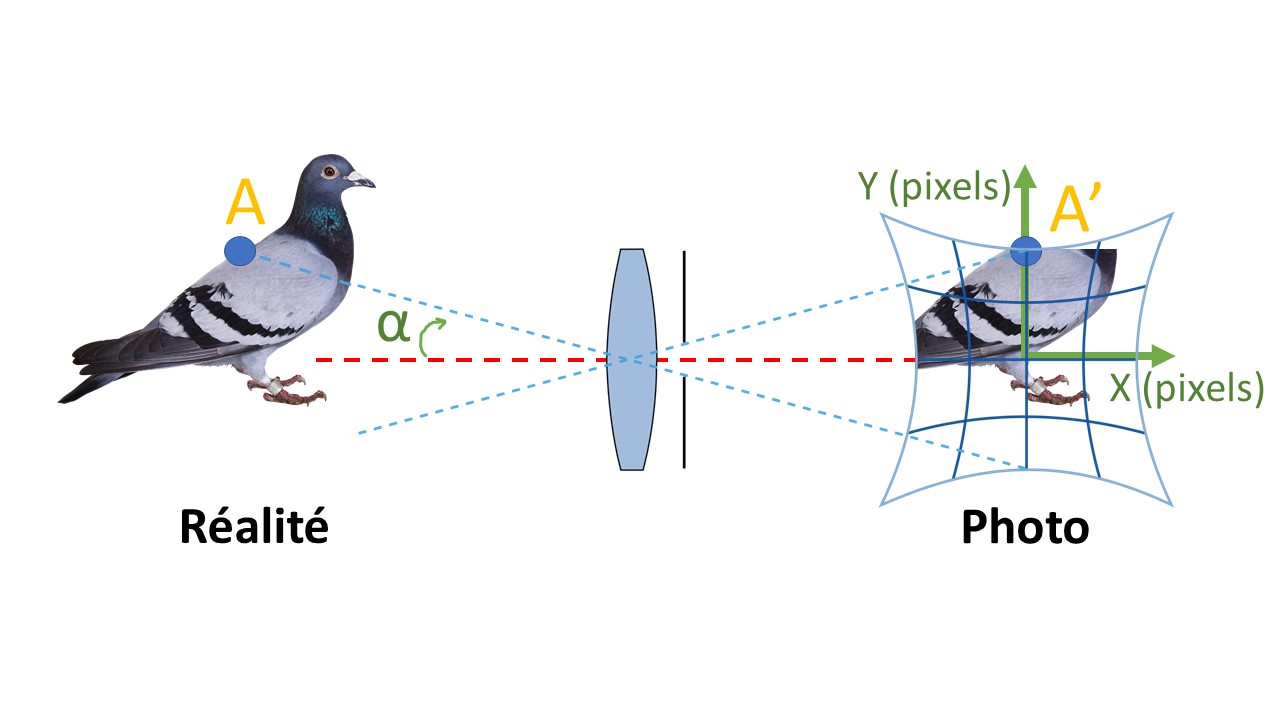
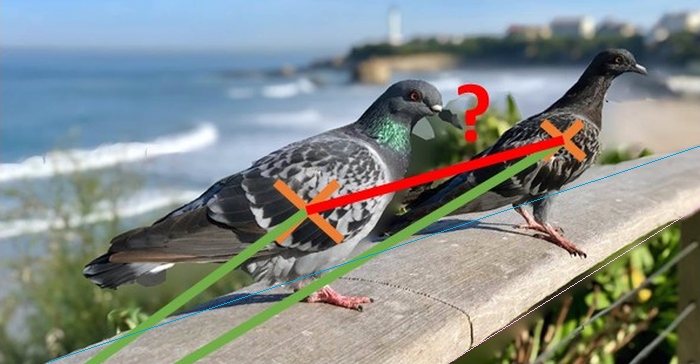
La distorsion est relativement limitée, si l'on en juge par l'incurvation apparente des bords de la balustrade, et une correction doit pouvoir la réduire (quoique je ne connaisse pas les fonctions utilisées).
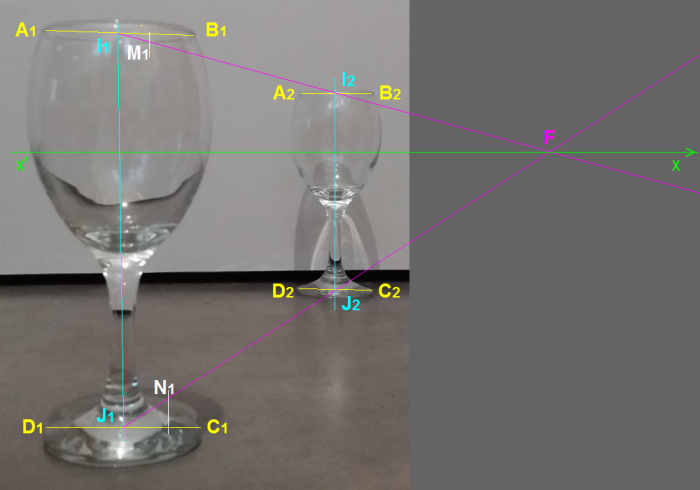
Le problème vient de ce que les images (M') des points objets (M) sur lesquels la mise au point a été faite se situent pratiquement dans le même plan (P') perpendiculaire à l'axe optique, à une distance du centre optique (C) voisine de la focale (f); dans le cas de la photo précédente, si l'on en juge au flou du paysage, ce plan ne se confond pas exactement avec le plan focal image (Π'), quoiqu'il en soit très proche.
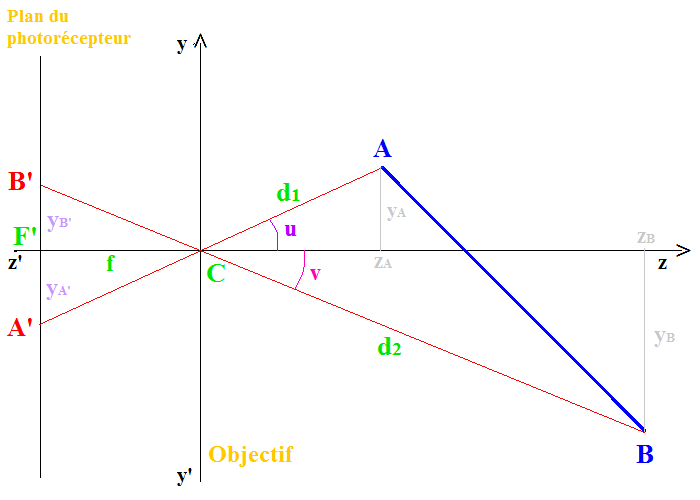
La formation des images résulte donc de la projection centrale de (M) sur le plan (P') par le centre optique (C) de l'objectif, de sorte que les relations de similitude entre triangles amènent toujours moins de relations qu'il n'y a d'inconnues; on aura ainsi pour le couple objet/image (MM'):
x/z = x'/f , y/z = y'/f , soit 4 inconnues, pseudo-focale comprise,
celle-ci pouvant être déterminée si l'on a photographié un segment objet (A°B°) de dimension connue (L°) situé à une profondeur donnée (zA° = zB° = d°):
L°/d° = (A'°B'°)/f
pour le même grandissement de l'image étudiée, cela va de soi.
Tu ne disposes donc à ce stade que les rapports des coordonnées (x, y, z).
L'indétermination ne peut être complètement levée que par la connaissance d'une distance supplémentaire en profondeur, pour le point objet considéré (par ex. d = CM) à l'aide un appareil laser (si j'ai bien compris la précision que tu donnes):

Envoyé par
Ayubowan

... mais j'ai la possibilité de rajouter un laser infrarouge pour avoir une référence, et donc les longueurs absolues des segments ...
La carte dont tu parles
Envoyé par
Ayubowan
... Mais je suppose qu'avec la depth map que j'obtiens, je peux en extraire les longueurs des deux segments non ? Je suppose qu'une depth map donne des profondeurs relatives ... ...
te fournit-elle des données précises concernant les profondeurs ? Cela pourrait te sortir d'embarras.
Il faut signaler qu'une autre difficulté surgira dès que tu amorcera des calculs: ceux-ci portent sur de petites distances déterminées sur l'image, et forcément entachées d'une forte incertitude en raison du flou des détails: cela risque de conduire à des résultats très décevants.
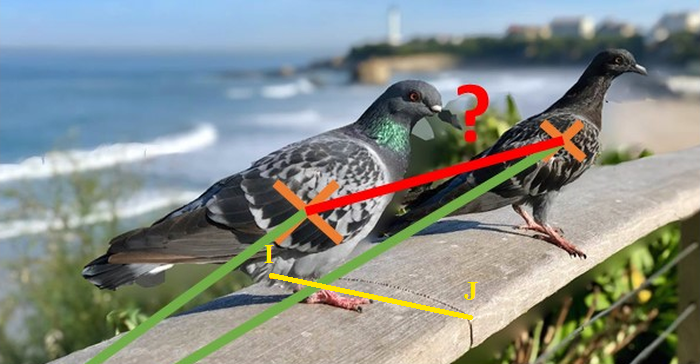
Et je n'ai pas évoqué la complexité des calculs, pour un objet de dimensions connues, mais non perpendiculaire à l'axe optique (noyade assurée  ): voir par exemple le segment (IJ).
): voir par exemple le segment (IJ).











 Répondre avec citation
Répondre avec citation













Partager